
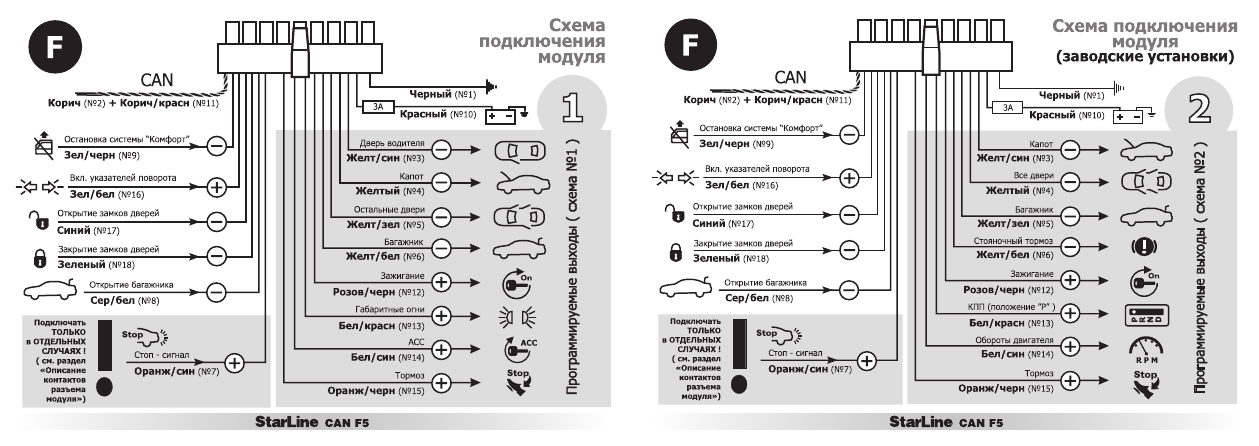
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
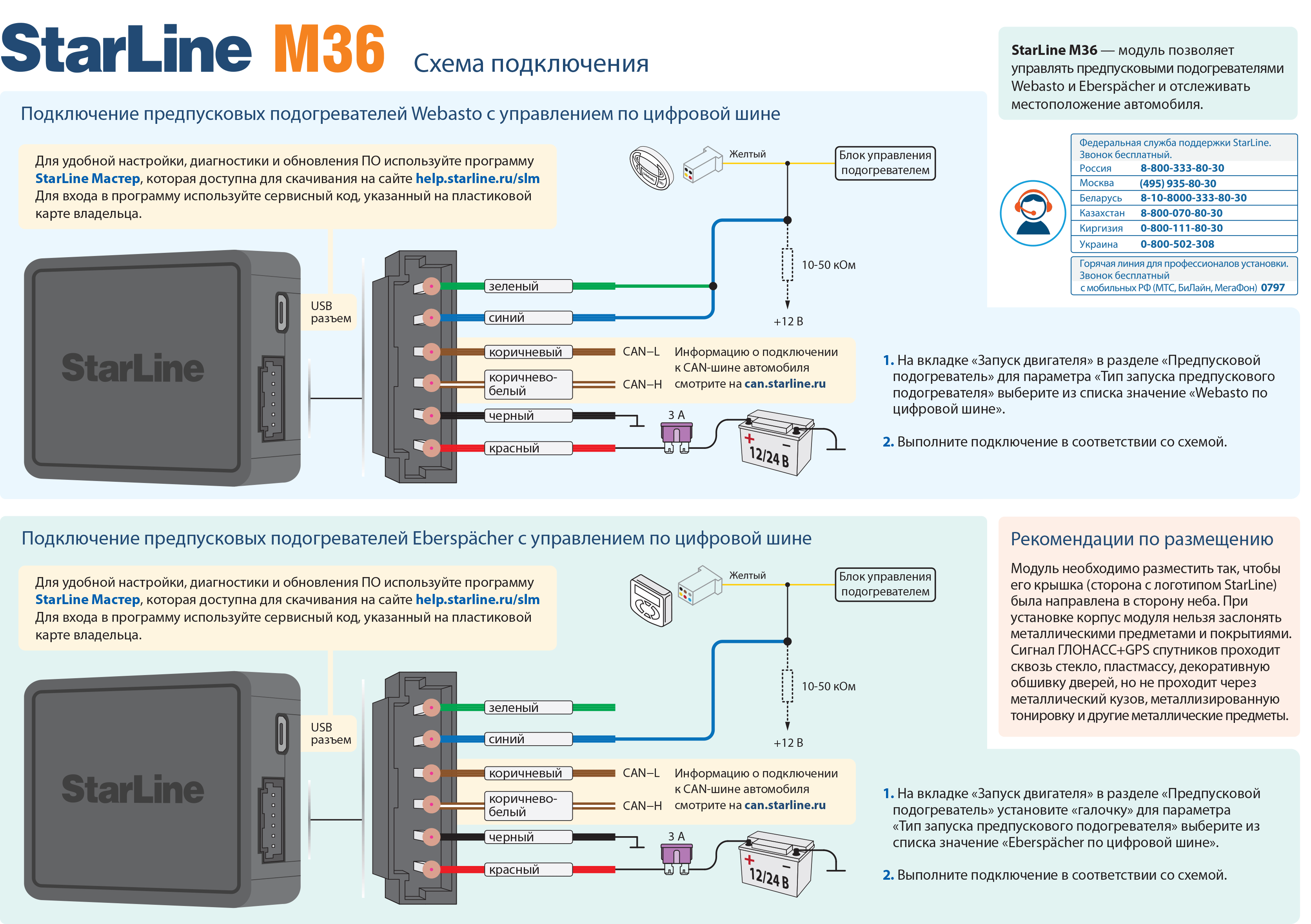
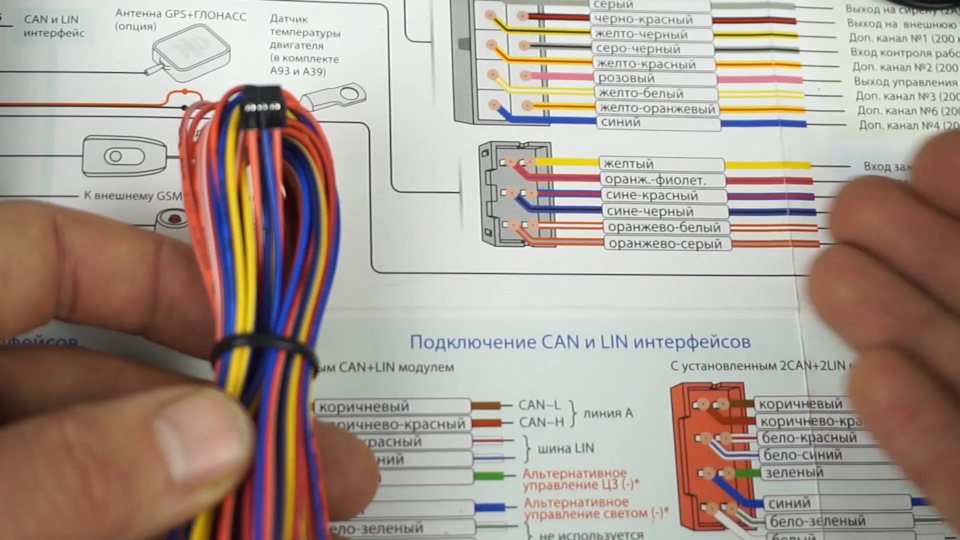
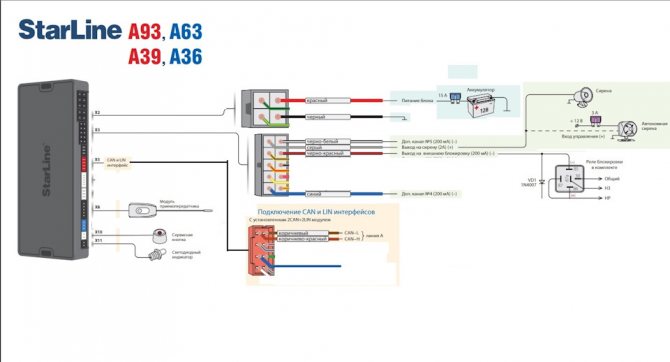
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Проверка плотности электролита
По плотности электролита можно узнать величину разряда аккумулятора. Измерение плотности производится специальным прибором – ареометром. Прибор опускается в заливное отверстие, после чего, при помощи груши нужно втянуть столько электролита, чтобы поплавок ареометра всплыл. Деления на шкале ареометра и покажут плотность электролита. При условии, что температура окружающей среды 20–30 градусов плотность электролита должна быть – 1,27 г/см3. Понижение уровня плотности на 0,001 г/см3 от номинальной соответствует потере ёмкости аккумулятора на 5–6%. На величину плотности существенную роль оказывает температура окружающей среды. Более подробные данные режимов можно узнать, посмотрев видео из Интернета.
Стандарты CI и CI+
Как было сказано выше, интерфейс CI используется для подключения такого устройства, как CAM модуль, что позволяет пользователям смотреть закодированные платные телеканалы. Но CI считается уже устаревшим вариантом по сравнению с усовершенствованной версией CI+.
В настоящее время большинством крупных операторов выпускается модуль CI+. Это устройство производится по новому стандарту, работает еще лучше, защищено от пиратского использования, имеет доступ к платным телевизионным каналам. В интерфейсе CI+ имеется защита от копирования данных между модулем CAM и телевизором. В любых моделях телеприемников, где был установлен CI, поддерживается и CI+.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.

Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Краткие сведения о протоколе CAN
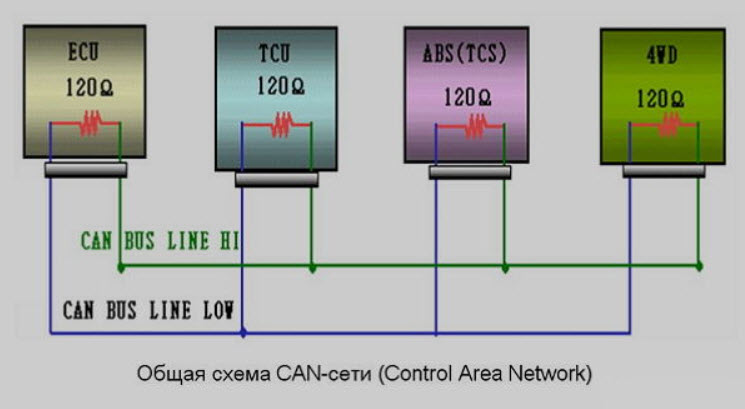
CAN (Controller Area Network – сеть контролеров) представляет собой протокол (стандарт) последовательной связи, разработанный для промышленных и автомобильных приложений. Это ориентированный на обмен сообщениями протокол, используемый для связи между множеством (несколькими) устройств. Когда различные CAN устройства соединены между собой как показано на следующем рисунке, они формируют сеть, которая работает наподобие центральной нервной системы человека и позволяет любому устройству общаться с любым другим устройством в этой сети.
CAN-сеть состоит из двух проводников (CAN High и CAN Low) и обеспечивает двунаправленную передачу данных. На практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары. Передача ведется кадрами, которые могут принимать все узлы сети. Для доступа к такой шине выпускаются специализированные микросхемы (модули) – драйверы CAN-шины.


Обычно скорость передачи по CAN-шине варьируется от 50 Кбит/с до 1 Мбит/с, а дальность связи лежит в диапазоне от 40 метров (на скорости 1 Мбит/с) до 1000 метров (на скорости 50 Кбит/с).
Формат CAN сообщений
В CAN-сети данные передаются в виде сообщений определенного формата. Этот формат состоит из большого числа сегментов, но двумя основными сегментами является идентификатор (identifier) и данные (data), которые и позволяют передавать и принимать сообщения по CAN-шине.
Идентификатор (Identifier) – также известен под именами CAN ID и PGN (Parameter Group Number). Он используется для идентификации CAN устройств в CAN-сети. Длина идентификатора составляет 11 или 29 бит в зависимости от того какой тип протокола CAN используется:
- Standard (стандартный) CAN: 0-2047 (11-bit);
- Extended (расширенный) CAN: 0-229-1 (29-bit).
Data – это данные, которые необходимо передать от одного устройства другому. Длина данных может составлять от 0 до 8 байт.
Data Length Code (DLC) (длина поля данных): может принимать значения от 0 до 8 в зависимости от количества байт для передачи.
Проводники, используемые в CAN
CAN протокол работает по двум проводникам, именуемыми CAN_H и CAN_L, для передачи и приема информации. Оба проводника работают как дифференциальная линия, что означает что CAN сигнал (0 или 1) представляет собой разность потенциалов между CAN_L и CAN_H. Если эта разность положительна и больше определенного минимального уровня напряжения, то это 1, а если эта разность отрицательна – то это 0.
Обычно в протоколе CAN используется кабель с витыми жилами. Как показано на выше приведенном рисунке, на обоих концах CAN-сети включается 120-омный резистор для обеспечения баланса в линии.
Сравнение CAN с SPI и I2C
На нашем сайте мы ранее уже рассматривали использование в платах Arduino протоколов SPI и I2C, поэтому давайте сравним данные протоколы с протоколом CAN.
| Параметр | SPI | I2C | CAN |
| Скорость | 3-10 Мбит/с | стандарт: 100 Кбит/с;
быстрый: 400 Кбит/с; быстрый: 3,4 Мбит/с; |
10 Кбит/с — 1 Мбит/с (зависит от длины используемых проводов) |
| Тип | синхронный | синхронный | асинхронный |
| Число проводов | 3+ (MISO, MOSI, SCK, SS1, SS2…SS(n)) | ||
| Дуплекс | полный дуплекс | полудуплекс | полудуплекс |
По скорости стандарт CAN не в лидерах, но его главным «козырем» является высокая надежность связи.
Применения CAN протокола
- В связи с чрезвычайно высокой надежностью и устойчивостью CAN протокола он широко применяется в автомобилях, промышленных механизмах, сельском хозяйстве, медицинском оборудовании и т.д.
- В связи с небольшим количеством используемых проводников CAN протокол исключительно удобен для применения в автомобилях.
- Устройства на основе CAN протокола отличаются низкой стоимостью.
- В CAN-сеть (шину) легко добавлять и удалять новые устройства.
Использование протокола CAN в Arduino
Поскольку платы Arduino не имеют в своем составе встроенного CAN порта, то для реализации связи между ними по данному протоколу мы будем использовать внешние CAN модули MCP2515. Эти модули подключаются к плате Arduino по интерфейсу SPI.
Преимущества и недостатки применения КАН-шины в автомобиле
Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля.
Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя.
Основные преимущества применения CAN-шины:
- возможность проведения оперативного контроля и диагностики всех систем автомобиля;
- объединение потоков информации в едином помехозащищенном канале;
- универсальность, способствующая унификации процессов диагностирования;
- возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля).
Недостатки CAN-шины:
- невысокая надежность;
- повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения.
Проблемы и варианты их решения
Модуль не может похвастаться особой стабильностью своей работы, иногда все таки приходится потанцевать возле него с бубном.
Обновление ПО GSM-модуля Мастер 5
Независимо от характера проблемы стоит для начала обновить прошивку модема на актуальную. Делается это “по воздуху”, без участия компьютера и программатора. Для этого отключаем охрану и отправляем SMS-команду 00591. На момент покупки у меня была версия HB03-O5, в ответ на данную команду пришла SMS: “HB03-O6, Обновление GSM, Пожалуйста подождите…”:
Через несколько минут модуль перезагрузился и прислал стандартное приветствие, но уже с новой версией прошивки.
Не выполняются команды через приложение, но работают SMS и звонки
Самая распространенная причина такого поведения — отсутствие GPRS соединения. Проверяется SMS-командой 41, в ответ приходит статус сотовой сети, координаты, напряжение аккумулятора, статус охраны и замков/дверей. Нас интересует первая строчка вида GSM: 31 (G). Если в скобочках у вас значение отличное от G, значит что интернет-соединения модуля нестабильно, отсюда и неработоспособность приложения. В первую очередь стоит попробовать:
- выключить GPRS-соединение SMS-командой 00550;
- перезагрузить модуль (команда аналогична скидыванию клемм АКБ) SMS-командой 00990;
- дождаться SMS-приветствия и включить GPRS обратно SMS-командой 00551.
Если не помогает, стоит попробовать просто позвонить на сим-карту, установленную в сигнализацию. Иногда это восстанавливает работоспособность модуля.
Во всех других случаях стоит подумать над сменой расположения блока сигнализации по отношению к металлическим элементам кузова автомобиля и сменой сим-карты на другого оператора.
Приложение часто теряет связь с машиной, красная иконка статуса
Помимо рекомендации в прошлом пункте, стоит попробовать снизить интервал пингов до 30–45 секунд SMS-командой следующего вида:
005400xx — где вместо xx указываем количество секунд.
Например:
Модуль завис и не реагирует даже на звонки, сбрасывает после трех гудков
Тут только один вариант — обесточить охранный комплекс. Иначе говоря скинуть клемму с АКБ, но стоит помнить о настройках магнитолы. На некоторых автомобилях после такой операции приходится вводить код для разблокировки оной.









Не открывается/не закрывается машина во время автозапуска
Это не столько проблема, сколько невнимательное чтение инструкции. В данном случае для отпирания и запирания центрального замка нужно использовать команды “Постановка на охрану” и “Снятие с охраны”.
Не открывается багажник, хотя с брелка работает
Управление багажником происходит по дополнительному каналу №1. Соответственно, если багажник отпиарается с брелка, то достаточно функцию AF#21 перевести из значения 2 (или другого) в значение 1. Про программирование сервисных функций подробнее читайте в статье про установку сигнализации.
Настройка модуля
При выполнении первой настройки надо сделать следующее:
- Производится поиск кнопки Valet для входа в аварийный режим. Место монтажа клавиши зависит от конструктивных особенностей транспортного средства. Если автовладельцу неизвестно, где установлена кнопка, ее можно найти по проводам, идущим от блока управления. Надо проверить все кабели от модуля, один из них идет на клавишу.
- Затем автовладелец нажимает семь раз по клавише входа в аварийный режим. При выполнении этой задачи зажигание в авто должно быть отключено.
- На следующем этапе ключ вставляется в выключатель и проворачивается, чтобы активировать зажигание. После этого блок управления сигнализацией начнет налаживать связь с новыми устройствами, которые были подключены к электросети. Блок в автоматическом режиме должен внести информацию о наличии всех дополнительных «гаджетов». В случае успешной привязки блока на экране брелка управления сигнализацией появится индикатор в виде спутника. Это свидетельствует о готовности охранного комплекса к настройке телематических функций.
Управление GSM-модулем Старлайн производится с применением основного номера владельца автомобиля, он обозначается как М1.
С данного телефона выполняется звонок на номер карты, установленной в блоке. Модуль автоматически примет входящий вызов при наличии средств на счету. Система поприветствует пользователя и предложит ввести пароль. При первичной настройке вводится код, который будет применяться для управления.
Пароль состоит из четырех знаков, которые надо записать после назначения. Если устройство примет код, то сигнализация воспроизведет звуковой сигнал. Затем блок управления системой попросит ввести еще один пароль. Он будет использоваться как дополнительный рубеж охраны, если в память модуля в будущем будет прописываться второй номер автовладельца. После ввода четырех цифр система воспроизведет звуковой сигнал.
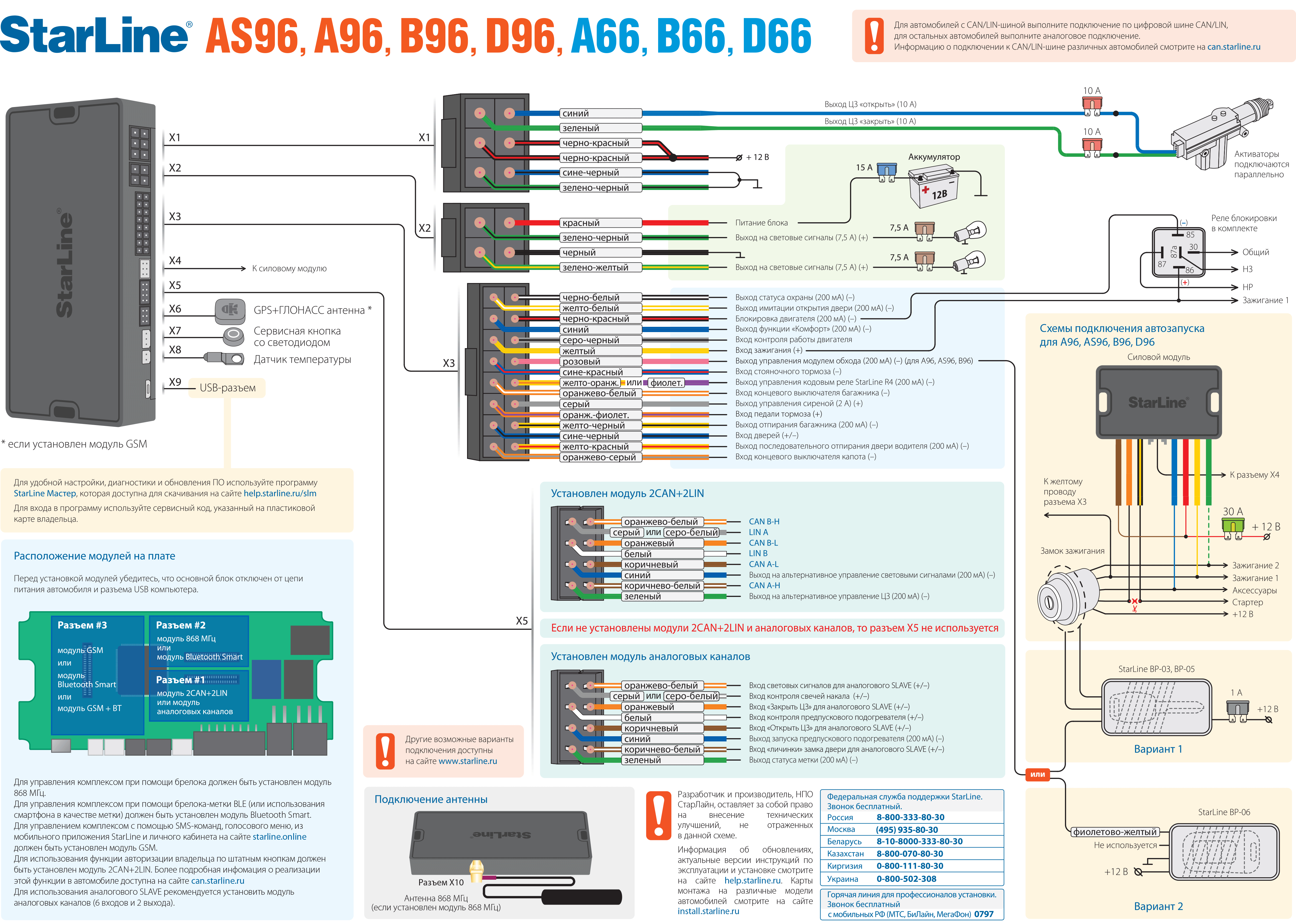
Настройка 2CAN-2LIN модуля
Распаковываем коробку, сверяемся с комплектацией. Не лишним будет заранее проверить ревизию и версии ПО, стикер должен быть наклеен на упаковке:
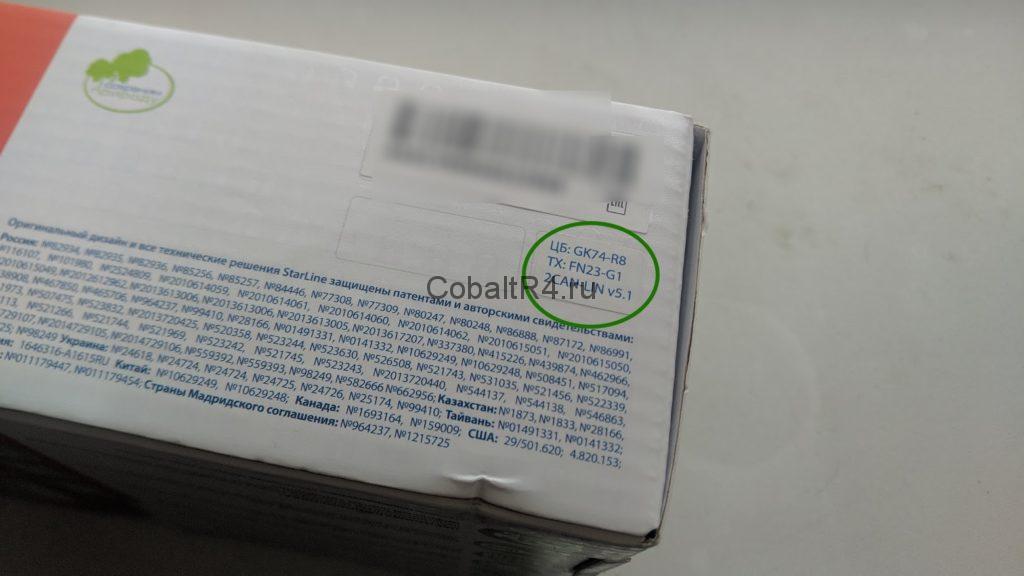
Самое главное — ревизия. ПО блока сигнализации можно обновить с помощью программатора (на самом деле обычный TTL конвертер на CP2102), а прошивка 2CAN-2LIN модуля так вообще прошивается с компьютера через USB. На момент написания этой статьи актуальная версия блока сигнализации — S2 (официальный чейнджлог и инструкции), модуля 2CAN-2LIN — 5.2.6.
С ревизиями чуть сложнее, их несколько по мере выхода: GK54, GK64, GK74, GK84. Отличия есть, как на уровне прошивок (не подходят между собой, так и функционально), поэтому по возможности берем сигнализацию с актуальной ревизией. Вопрос по теме на форуме старлайн.
Вернемся к комплектации:

Я купил в исполнении Eco (нет, не экология, как можно подумать, а эконом), в нем комплекс комплектуется одним основным пультом. Второй никто не запрещает докупить отдельно. Мне же он не особо нужен.
Убедившись, что нас не налюбили, сразу приступаем к прошивке 2CAN-2LIN модуля под Ravon R4. Откручиваем четыре винта и вынимаем плату из корпуса:

На компьютер скачиваем и устанавливаем программу Starline Master соответственно своей ОС: тык
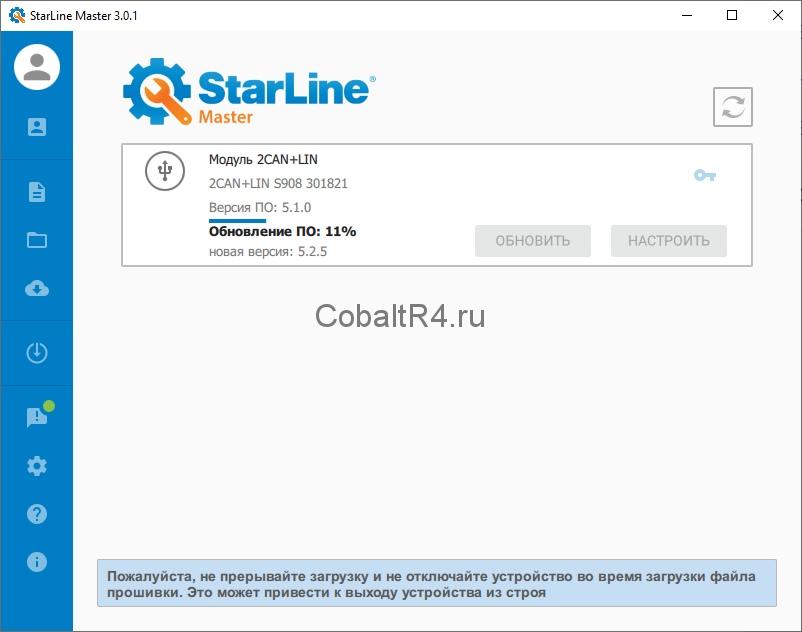
Подключаем MicroUSB кабель к плате кан-модуля и к компьютеру, предварительно запустив старлайн мастер:

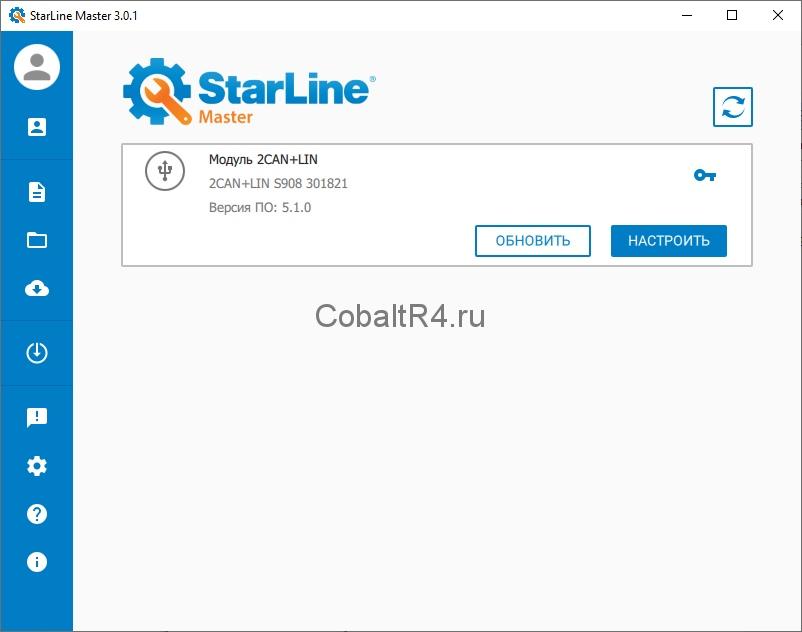
Убеждаемся, что модуль определился программой и сразу обновляем прошивку. Скачиваем из библиотеки старлайн: https://can.starline.ru/19/99/7696 , должны получить файл с именем starline_2can_lin_5‑2–6_can_5‑2–6‑24526_Ravon_R4.bin. Жмём “Обновить” и указываем путь к скаченному .bin файлу. Начнется процесс обновления:
После завершения переходим в настройки путем нажатия соответствующей кнопки. В пункте Автомобиль выбираем в выпадающем списке Ravon R4 (2016 — 2020). Должны будут появиться настройки модуля под наш автомобиль:
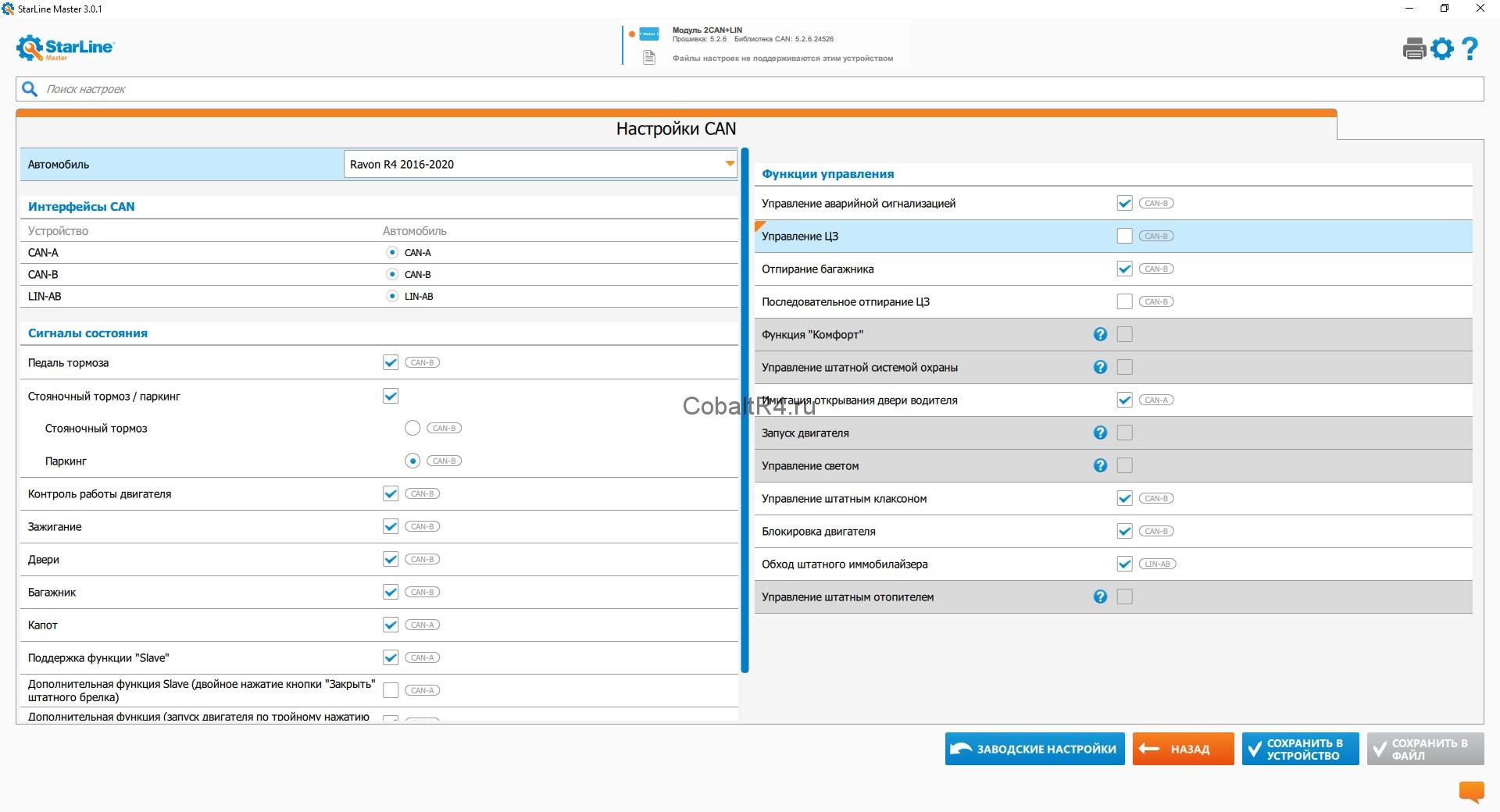
В левом столбце я активировал все функции, кроме двойного нажатия “Закрыть” штатного брелка. Учитывая, что коробка у меня автомат, был выбран контроль нейтрали для автозапуска по паркингу. Единственное, что в этом списке можно не выбирать, это Slave и связанные с ней функции, если вам по какой-то причине не нравится данный режим работы сигнализации (забегая наперед: Slave — подчинение, режим в котором сигнализация управляется штатным брелком автомобиля, но неправильное его использования является огромной уязвимостью для угонщиков).
В правом столбце ситуация уже интереснее. Если левый — сигналы состояния, их получение с задержкой (или вообще пропуск) не так страшно, то пропуски команд управления нарушают задуманную работу охранного комплекса. Например, спустя две недели эксплуатации я отключил функцию управления центральным замком через CAN-модуль, потому что иной раз она просто не срабатывала. Машина становилась/снималась на/с охраны, но центральный замок не срабатывал. И ладно, если ЦЗ откажется открыть двери, хуже когда он их не закрывает, а владелец ожидая от сигнализации запирания автомобиля оставляет транспорт нараспашку. Пришлось подключить управление ЦЗ аналоговым путем, путем врезания в два провода кнопки на парпризе слева от аварийной сигнализации. Такой вариант надежен и гарантирует 100% срабатывания. Но есть нюанс, вместе с управлением ЦЗ отключается и другая функция — имитация открытия водительской двери. Её придется так же реализовывать проводным подключением, иначе магнитола и салонное освещение будут продолжать работать после постановки на охрану/дистанционной остановки двигателя.
Управление аварийкой, отпирание багажника, блокировку двигателя и обход штатного иммобилайзера смело оставляем, с ними проблем я на данный момент не выявил.
Управление штатным клаксоном можно включить на будущее (его поддержка появилась в версии ПО основного блока S2, моя версия младше и без этой функции).
Последовательное отпирание ЦЗ — на любителя, функция подразумевает первоначальное открытие только водительской двери, затем при повторном нажатии всех остальных. Разумеется, при аналоговом подключении она не работает.





На этом настройки CAN-модуля можно завершить. Еще раз напомню, что всё что мы активировали на данный момент, будет работать программно посредством однопроводного подключения к шине, иначе каждую из этих функций придется подключать аналоговым путём.
Возможности приложения Starline для Android:
- простая регистрация — зарегистрируйте вашу охранную систему с помощью удобного мастера регистрации;
- выбор устройства — возможность работать сразу же с несколькими устройствами starline своего автопарка;
- установка и снятие своего автомобиля с охраны;
- запуск или остановка двигателя;
- настройка параметров запуска по температуре или по таймеру;
- возможность запуска режима «Антиограбление»;
- перевод охранной сигнализации в сервисный режим при необходимости сдать авто в ремонт или на диагностику;
- запуск краткого сигнала сирены;
- настройка датчиков удара или наклона, либо их отключение;
В приложении Starline понятная индикация — Вы всегда можете убедиться, поставлен ли автомобиль под охрану. Все сигналы тревоги видны с первого взгляда. Если охранная сигнализация оборудована сим-картой, вы сможете контролировать ее баланс, а так же заряд аккумулятора, температуру в салоне или температуру двигателя.
В приложении Starline предусмотрены PUSH-уведомления, чтобы мгновенно получать сообщения о событиях, которые происходят с Вашим автомобилем.
Благодаря мониторинговому сервису starline-online.ru Вы сразу же узнаете о местоположении своего автомобиля, изучить пройденный маршрут.
Из приложения можно позвонить в службу технической поддержки компании СтарЛайн, а так же в службу спасения и помощи на дороге.
Взаимодействие посредством приложения
У сигнализации starline a93, которая оснащена модулем GSM, предусмотрена возможность управления посредством приложения (например, телематики). Теперь со своей машиной вы всегда будете на связи.

Starline имеет встроенную GSM-систему. Именно этот модуль посредством приложения и позволяет управлять автосигнализацией через мобилку. В самом модуле стоит СИМ-карта, так что взаимодействие с GSM во многом напоминает обычный телефонный звонок друг другу. Человек, используя приложение, посылает определенную команду, а затем приходит уведомление о том, выполнена она или нет. Благодаря GSM при помощи программных средств автосигнализацией starline можно управлять где угодно в пределах приема того или иного оператора сотовой связи. По сути управление с телефона своим собственным авто возможно даже, когда вы находитесь на другом конце земного шара!
Итог
Сомневаюсь, что до сюда кто-либо дочитает, но всё же. Будь какой-либо опыт в подобных инсталляциях а так же инструмент (к примеру: провода в моторный щит продевал больше часа, банально под рукой отсутствовало шило) установка заняла бы куда меньше времени. И я не говорю про время, затраченное на первичную установку. Еще после этого основной блок сигнализации несколько раз снимался для экспериментов с настройками CAN и прошивками от схожих автомобилей (в итоге даже от кобальта прошивка почти не работала). И при всей кривости монтажа своими руками делать всё равно приятнее, к тому же разобравшись (относительно) в вопросе я буду готов к любым неисправностям сигналки и буквально в поле смогу справиться с проблемами, которые могут попрепятствовать началу движения (вспоминаем случай из группы Ravon R4 во вконтакте, когда человек не смог завести автомобиль во время отдыха на природе из-за ошибки иммобилайзера).
Спустя месяц после столь кустарной установки сигнализация еще ни разу не подвела и каких-либо сбоев не было. Ток утечки с учетом всего установленного хлама в автомобиле — примерно ~80мАч, если верить китайскому мультиметру. Спустя пару недель после установки был докуплен отдельно модуль Starline Мастер GSM‑5. Как нетрудно догадаться, с его установкой появилась возможность контролировать автомобиль на любом расстоянии посредством голосовой связи и смс непосредственно на модем модуля и приложением на смартфоне через интернет.
Просмотров статьи: 6 514



